Note
Go to the end to download the full example code
How to use self calibration module¶
The magnetic field read by the sensors inside km3net DOM are sending a measurement in cartesian referential. When a DOM is placed under an uniform magnetic field, rotating it should only results in a modification of the magnetic field direction. However, the natural coordinates system is often not centered on (0,0,0), which raise the need to perform a calibration before using converting the magnetic field data in a direction measurement.
This script is an example on how use the calib_self_sphere class
on acceptance tests data in order to estimate the point around which
the magnetic field is revolving, allowing a calibration directly
computed on data.
import km3compass as kc
import matplotlib.pyplot as plt
Loading some data¶
Initialising is a simple as this:
filename = "../tests/DOM_0801.csk"
reader = kc.readerCSK(filename)
print(reader.module_IDs)
File loaded, 2508 rows
1 module(s)
- 817302522
Number of measurements after removing duplicates : 252
[817302522]
Loading the module¶
The calib_self_sphere will fit a sphere to the raw magnetic
field data, and will then correct the data from the estimated
center.
calib = kc.calib_self_sphere(reader, 817302522)
Print fit results¶
Here, we print the center and radius reconstructed by the fit. We also display a plot that summarize the calibration results.
print("Center : {}".format(calib.center.flatten()))
print("Radius : {}".format(calib.radius))
calib.plot_results()
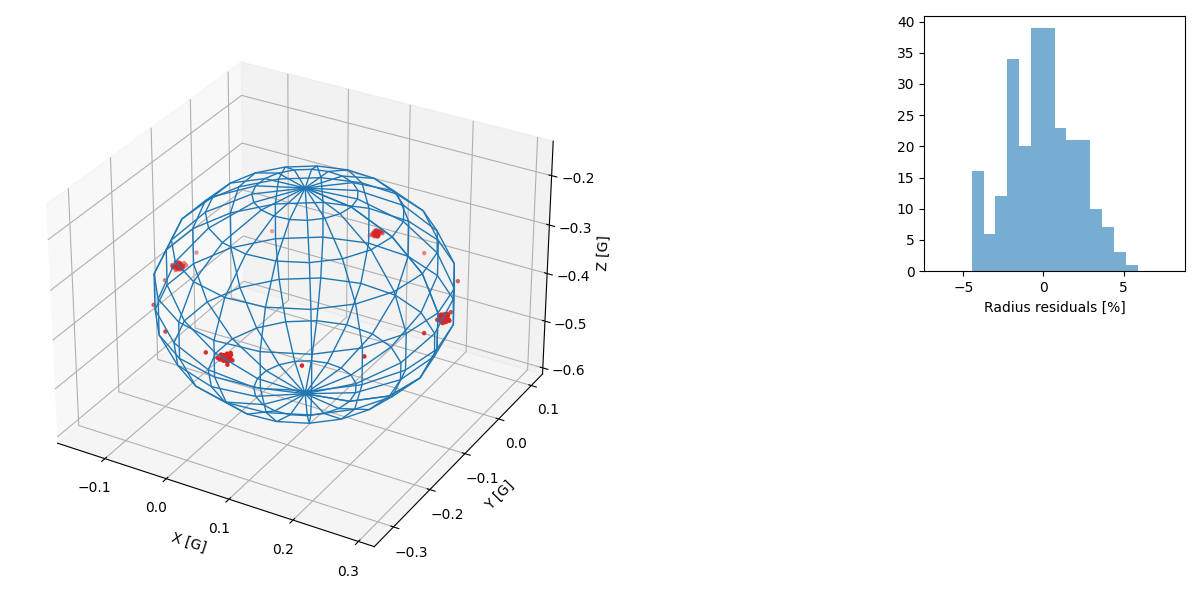
Center : [ 0.0736884 -0.10788356 -0.37211751]
Radius : [0.21029674]
Comparing data before and after calibration¶
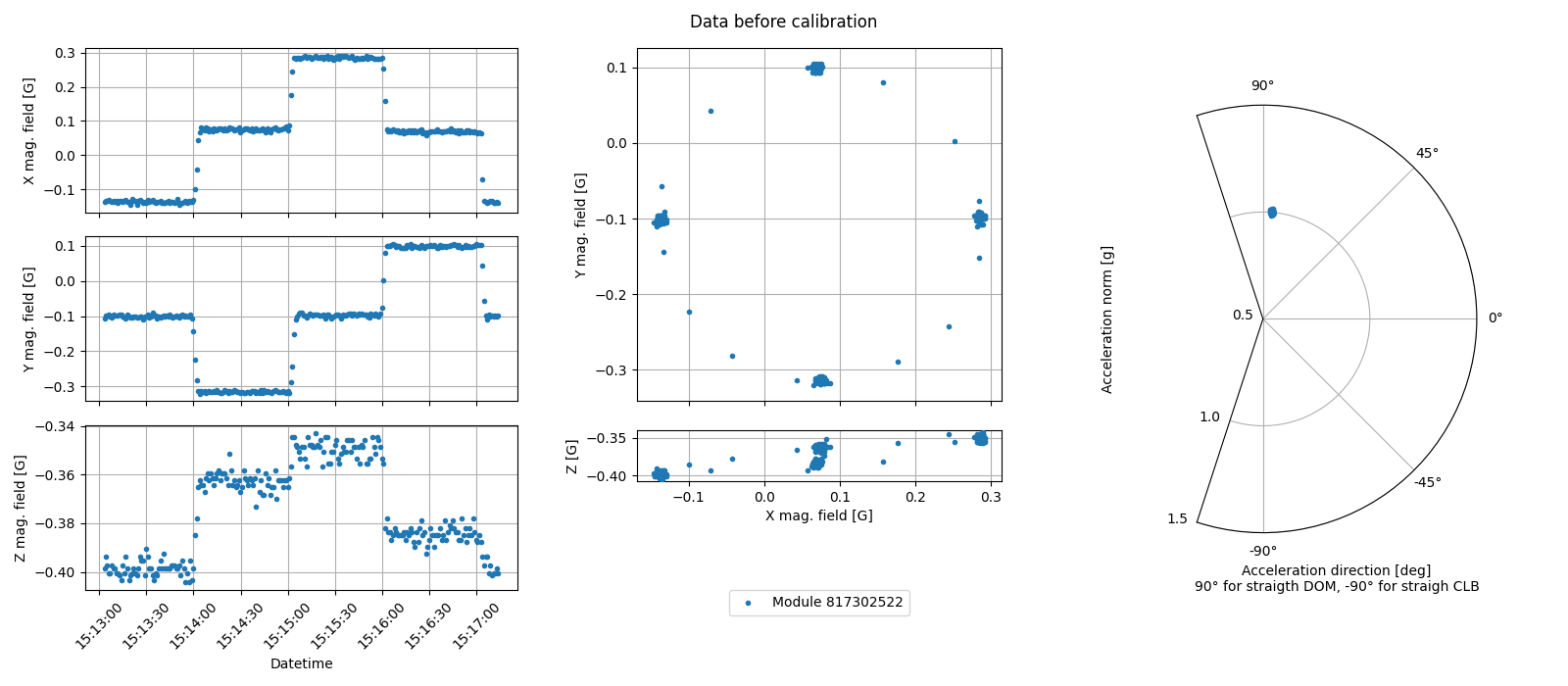
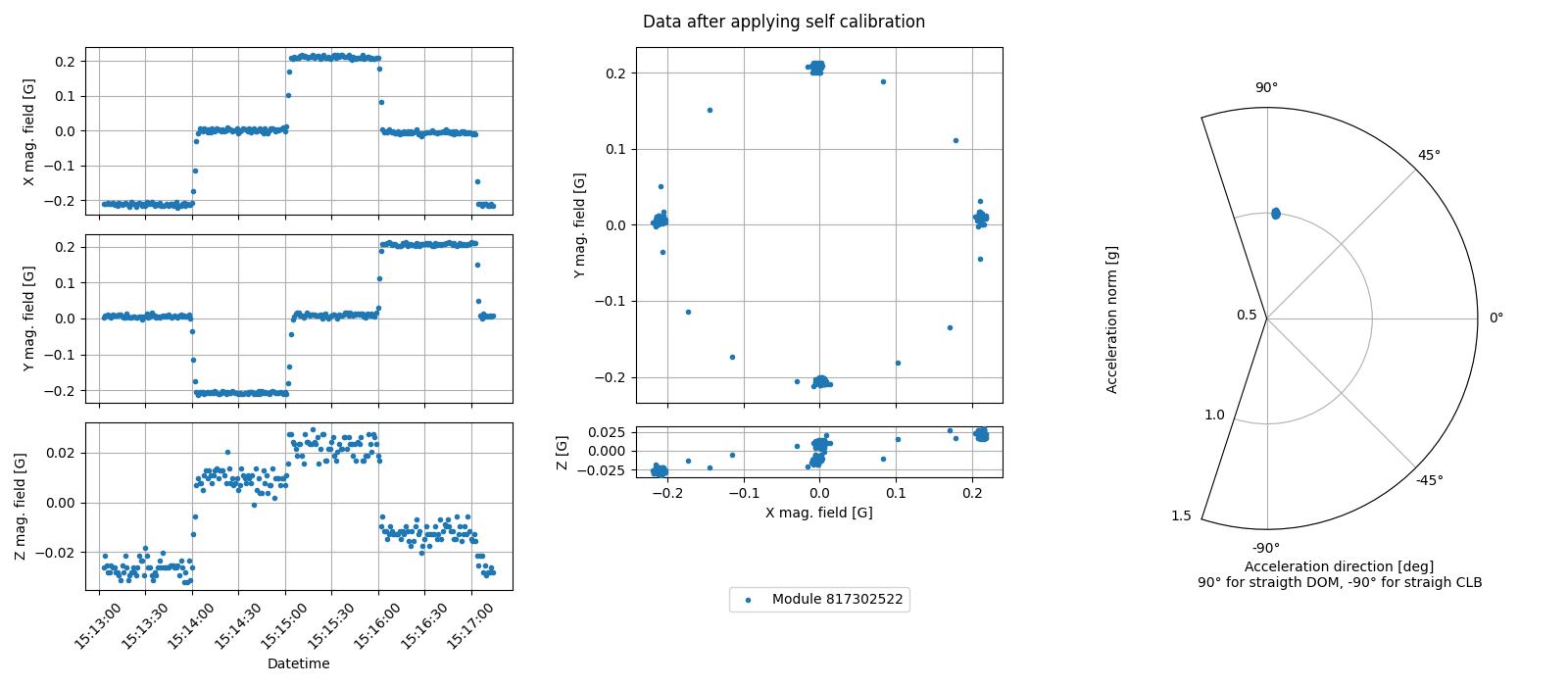
To do so, we will use the kc.plot_raw_results function, that
works for both raw and calibrated data :
kc.plot_raw_results(reader.df, title="Data before calibration")
kc.plot_raw_results(calib.df, title="Data after applying self calibration")
plt.show()
Total running time of the script: (0 minutes 2.001 seconds)